Đo nghiêng trên máy GNSS RTK là gì?
Định nghĩa
Đo nghiêng (Hay đo bù nghiêng) là một tính năng quan trọng được tích hợp trên máy RTK. Khi kích hoạt tính năng này, người dùng có thể thu thập tọa độ điểm với độ chính xác hàng cen-ti-mét mà không cần dựng thẳng sào máy.

Đo RTK thông thường, người khảo sát luôn dựng thẳng sào máy sao cho bọt thủy nằm ở giữa trước khi thu thập tọa độ điểm.

Đo RTK sau khi tính năng đo nghiêng được khởi tạo, người khảo sát có thể đặt sào máy nghiêng mà vẫn thu thập được tọa độ điểm.
Tính năng đo nghiêng có quan trọng không?
Trong thực tế, không phải lúc nào người khảo sát cũng có thể dựng thẳng sào. Một số ví dụ điển hình như sau:
- Điểm đo nằm ở góc tường, cạnh tường
- Điểm đo bị che khuất bởi các vật thể không mong muốn
- Điểm đo nằm ở các điểm khó với tới như ao, hồ, sông, suối
- Điểm đo nằm ở khu vực nguy hiểm
Trong những trường hợp trên, người dùng bắt buộc phải kích hoạt tính năng đo nghiêng để đặt chân sào vào điểm đo nhằm thu thập dữ liệu, trong khi vẫn đạt độ chính xác yêu cầu. Vậy nên, tính năng đo nghiêng có thể nói là không thể thiếu với một máy GNSS RTK hiện đại.

Điểm đo bị ô tô che mất, cần kích hoạt tính năng đo nghiêng để thu thập tọa độ điểm cần đo!
Nguyên lý hoạt động của tính năng đo bù nghiêng trong máy RTK
Thông thường, khi khảo sát, người dùng phải để sào máy thẳng đứng, vuông góc với mặt phẳng trái đất để máy RTK thu thập được tọa độ X,Y. Còn cao độ Z thì chỉ cần lấy cao độ hiện tại máy thu thập được, trừ đi chiều cao sào máy là được.
Vậy khi sào máy nghiêng, máy RTK chỉ có thể tính toán được tọa độ tại vị trí của đầu máy, làm sao để biết được tọa độ điểm tại chân máy? Câu trả lời là cảm biến IMU tích hợp bên trong máy và thuật toán được cài đặt sẵn trong main.
Cảm biến IMU
IMU ( viết tắt của Inertial measurement unit) – là một cảm biến được tích hợp bên trong máy RTK (Hoặc hầu hết các thiết bị điện tử) nhằm đo lường quán tính, gia tốc, tốc độ, góc nghiêng của thiết bị so với trục vuông góc với bề mặt trái đất.
Hai thành phần chính cấu tạo lên cảm biến IMU:
Gia tốc kế
Dùng để đo gia tốc của bản thân cảm biến IMU, thường gồm 2 hoặc 3 trục, ứng với 3 chiều không gian.
Con quay hồi chuyển
Dùng để đo tốc độ quay quanh một trục của cảm biến IMU, cũng như góc nghiêng của IMU so với trục vuông góc với mặt phẳng trái đất.
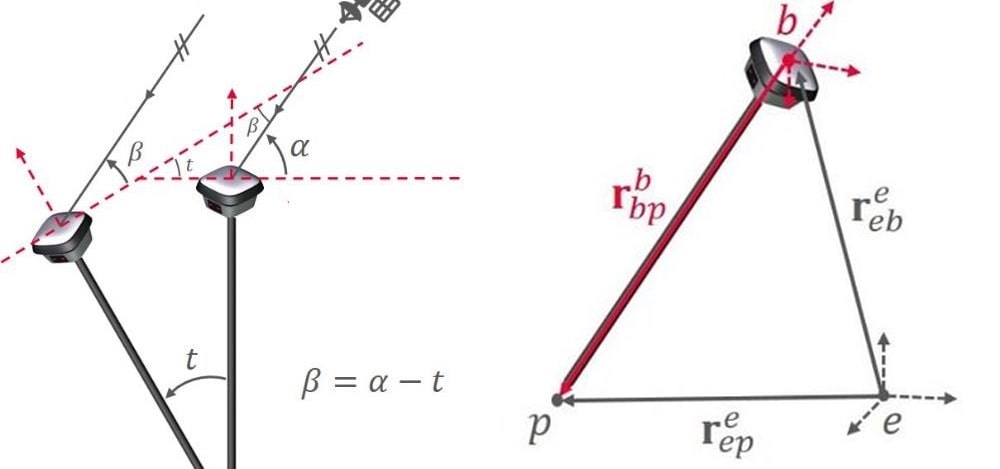
Nhờ vào cảm biến IMU, mà máy RTK có thể xác định được 2 yếu tố là góc nghiêng và hướng nghiêng của sào máy so với trục thẳng đứng. Kết hợp với chiều cao sào, máy RTK có thể biết được vị trí của nó so với điểm cần đo.
Các thuật toán được cài đặt trong bộ vi xử lý của máy RTK
Các thuật toán này là một loạt các công thức, để máy có thể tính toán ra tọa độ điểm cần đo sau khi biết được góc nghiêng, và hướng nghiêng của sào máy. Các thuật toán này khá phức tạp, đòi hỏi trình độ chuyên môn cao để hiểu & giải thích.
Tổng kết cơ chế hoạt động của đo nghiêng trên máy GNSS RTK
Trên cơ sở phân tích bên trên, có thể kết luận việc máy RTK có thể đo tọa độ điểm ngay cả khi sào máy đặt nghiêng là nhờ 2 yếu tố chính:
- Cảm biến IMU: Để xác định góc nghiêng, hướng nghiêng của đầu thu GNSS so với trục vuông góc với mặt phẳng trái đất
- Chiều cao sào máy: Tính khoảng cách từ máy thu GNSS đến điểm cần đo
- Các thuật toán: Nhằm giải quyết các số liệu trên, đưa tọa độ đầu thu GNSS thành tọa độ điểm cần đo
Có nên thường xuyên sử dụng tính năng đo nghiêng hay không?
Để có thể trả lời câu hỏi này, ta phải cân nhắc đến vấn đề về độ chính xác. Khi khởi tạo tính năng đo nghiêng, máy RTK sẽ phải thêm một bước tính toán nữa để xác định tọa độ điểm đo.
Ngoài ra, các số liệu về góc nghiêng, hướng nghiêng, chiều cao sào máy cũng có sai số.
Kết luận: Tính năng đo nghiêng sẽ khiến sai đo RTK tăng thêm vài cen-ti-mét, nên chỉ sử dụng tính năng này khi thật sự cần thiết!